Группа ученых предложила уникальную методику осязания для роботов, согласно которой роботы могут различать схожие по текстуре поверхности гораздо лучше, чем люди. Результаты исследований по этому вопросу опубликованы в научном журнале Frontiers in Neurorbotics.
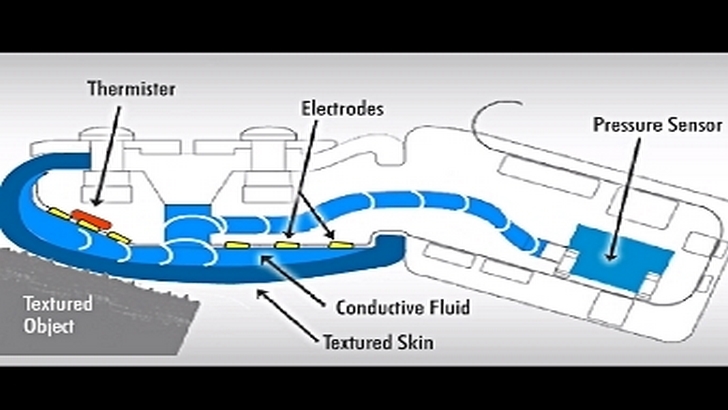
Уже сегодня исследователи собрали опытную модель робота, который полностью состоит из доступных в продаже запчастей, и теперь ведутся активные работы по созданию специального программного обеспечения, отвечающего за способность образца различать текстурированные сходные поверхности. Осязательный элемент представляет собой некое подобие человеческого пальца. Снаружи палец покрыт материалом, напоминающим натуральную человеческую кожу с характерными папиллярными узорами, а внутри тело наполнено жидкостью. Также в тело пальца были вмонтированы датчики давления, силы и тепла. При скольжении пальца по рельефной поверхности в жидкости возникали колебания, которые записывал специальный датчик-микрофон.
Известно, что процесс осязания поверхности всегда связан с некоторыми движениями, носящими исследовательский характер. Чтобы получить представление об интересуемом предмете и его поверхности, человеку необходимо потрогать объект. В противном случае на поверхности человеческого пальца не возникает никаких колебаний, и сделать вывод об особенностях исследуемой поверхности невозможно.
Для того чтобы роботы могли различать поверхности, ученые изобрели особый метод, основанный на теории вероятности и теории Байеса. На основе косвенных данных теоритические выводы могут дать представление о вероятности события, или, говоря иначе, предположить, какая именно поверхность находится под роботизированным пальцем.
На первом этапе роботу было представлено для исследования 117 типов различных поверхностей из разных материалов. После этого в качестве опытного задания роботу предложили определить одну из изученных поверхностей и безошибочно дать ее наименование. В результате эксперимента роботу понадобилось совершить всего 5 тактильных движений, чтобы определить тип материала и поверхности с вероятностью 95%. В то же время при неограниченном количестве тактильных движений робот определял тип поверхности с вероятностью 99,6%. Такая высокая точность значительно превышает возможности даже человеческого тела и его рецепторов осязания.
Ученые полагают, что проведенные исследования и выработанная методика позволит в будущем создавать протезы, способные не только внешне имитировать конечность человека, но и обладать функцией полноценного осязания предметов. Большие перспективы также открываются для начала работ по разработке роботов, наделенных осязанием.








Комментарии: (0)