Гармонические Колебания
Механическое гармоническое колебание - это прямолинейное неравномерное движение, при котором координаты колеблющегося тела (материальной точки) изменяются по закону косинуса или синуса в зависимости от времени.
Согласно этому определению, закон изменения координаты в зависимости от времени имеет вид:
Уравнения (4.1) являются основными кинематическими уравнениями механических гармонических колебаний.
Рассмотрим следующий пример. Возьмем ось Ох (рис. 64). Из точки 0 проведем окружность с радиусом R = А. Пусть точка М из положения 1 начинает двигаться по окружности с постоянной скоростью v (или с постоянной угловой скоростью w, v = wА). Через некоторое время t радиус повернется на угол ф: ф=wt.
При таком движении по окружности точки М ее проекция на ось х Мх будет совершать движение вдоль оси х, координата которой х будет равна х = А • cos ф = = А • cos wt. Таким образом, если материальная точка движется по окружности радиусом А, центр которой совпадает с началом координат, то проекция этой точки на ось х (и на ось у) будет совершать гармонические механические колебания.
Если известна величина wt, которая стоит под знаком косинуса, и амплитуда А, то можно определить и х в уравнении (4.1).
Величину wt, стоящую под знаком косинуса (или синуса), однозначно определяющую координату колеблющейся точки при заданной амплитуде, называют фазой колебания. Для точки М, движущейся по окружности, величина w означает ее угловую скорость. Каков физический смысл величины w для точки Мх, совершающей механические гармонические колебания? Координаты колеблющейся точки Мх одинаковы в некоторый момент времени t и (Т +1) (из определения периода Т), т. е. A cos wt = A cos w (t + Т), а это значит, что w (t + Т) - wt = 2ПИ (из свойства периодичности функции косинуса). Отсюда следует, что

![]()
Следовательно, для материальной точки, совершающей гармонические механические колебания, величину w можно интерпретировать как количество колебаний за определенный цикл времени, равный 2л. Поэтому величину w назвали циклической (или круговой) частотой.
Если точка М начинает свое движение не из точки 1 а из точки 2, то уравнение (4,1) примет вид:
Величину ф0называют начальной фазой.
Скорость точки Мх найдем как производную от координаты по времени:
Ускорение точки, колеблющейся по гармоническому закону, определим как производную от скорости:
Из формулы (4.4) видно, что скорость точки, совершающей гармонические колебания, изменяется тоже по закону косинуса. Но скорость по фазе опережает координату на ПИ/2 . Ускорение при гармоническом колебании изменяется по закону косинуса, но опережает координату по фазе на п. Уравнение (4.5) можно записать через координату х:
Ускорение при гармонических колебаниях пропорционально смещению с противоположным знаком. Умножим правую и левую части уравнения (4.5) на массу колеблющей материальной точки т, получим соотношения:
Согласно второму закону Ньютона, физический смысл правой части выражения (4.6) есть проекция силы Fx, которая обеспечивает гармоническое механическое движение:
Величина Fx пропорциональна смещению х и направлена противоположно ему. Примером такой силы является сила упругости, величина которой пропорциональна деформации и противоположно ей направлена (закон Гука).
Закономерность зависимости ускорения от смещения, вытекающую из уравнения (4.6), рассмотренную нами для механических гармонических колебаний, можно обобщить и применить при рассмотрении колебаний другой физической природы (например, изменение тока в колебательном контуре, изменение заряда, напряжения, индукции магнитного поля и т. д.). Поэтому уравнение (4.8) называют основным уравнением динамики гармонических колебаний.
Рассмотрим движение пружинного и математического маятников.
Пусть к пружине (рис. 63), расположенной горизонтально и закрепленной в точке 0, одним концом прикреплено тело массой т, которое может перемещаться вдоль оси х без трения. Коэффициент жесткости пружины пусть будет равен k. Выведем тело m внешней силой из положения равновесия и отпустим. Тогда вдоль оси х на тело будет действовать только упругая сила, которая согласно закону Гука, будет равна: Fyпp = -kx.
Уравнение движения этого тела будет иметь вид:

Сравнивая уравнения (4.6) и (4.9), делаем два вывода:
- Движение тела на пружине будет происходить по гармоническому закону, т. е. тело m будет совершать механические гармонические колебания;
-
Сравнивая коэффициенты перед х уравнений (4.6) и (4.9),
заключаем, что циклическая частота этих гармонических
колебаний будет равна:

Из формул (4.2) и (4.10) выводим формулу для периода колебаний груза на пружине:
Математическим маятником называется тело массой т, подвешенное на длинной нерастяжимой нити пренебрежимо малой массы. В положении равновесия на это тело будут действовать сила тяжести и сила упругости нити. Эти силы будут уравновешивать друг друга.
Если нить отклонить на угол а от положения равновесия, то на тело действуют те же силы, но они уже не уравновешивают друг друга, и тело начинает двигаться по дуге под действием составляющей силы тяжести, направленной вдоль касательной к дуге и равной mg sin a.
Уравнение движения маятника принимает вид:
Знак минус в правой части означает, что сила Fx = mg sin a направлена против смещения. Гармоническое колебание будет происходить при малых углах отклонения, т. е. при условии а 2* sin a.
Заменим sin а в уравнении (4.12), получим следующее уравнение:
Уравнение (4.13) показывает, что ускорение колебания маятника прямо пропорционально смещению и противоположно ему направлено. Следовательно, маятник будет совершать механические гармонические колебания с циклической частотой

и поэтому, согласно уравнению (4.2), период колебаний его будет равен:
Превращение энергии при гармонических механических колебаниях рассмотрим на примере пружинного маятника. В любой момент времени полная энергия колеблющегося груза (Еполн) будет состоять из кинети-

Полная энергия при гармонических механических колебаниях пропорциональна квадрату амплитуды и квадрату циклической частоты.
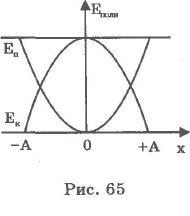
На рис. 65 качественно изображены графики зависимостей потенциальной и кинетической энергии пружинного маятника от координаты х.
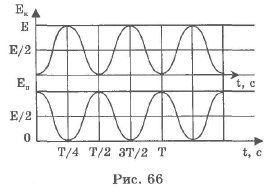
На рис. 66 представлены качественные графики зависимостей кинетической и потенциальной энергии от времени.
За начальный момент времени принято положение тела, максимально отклоненное от положения равновесия. Частота колебания потенциальной и кинетической энергии в два раза больше, чем частота колебания движущегося тела.










Комментарии: (0)