Динамика изменения длины движущегося стержня




Измерить длину покоящегося стержня возможно путем наложения на его, допустим, метра. Измерить длину движущегося стержня таким способом невозможно, поэтому используют косвенный метод. В чём его суть?
Рассмотрим динамику изменения длины движущегося стержня на диаграмме Минковского.
Пример. В системе α (рис.1), в направлении Хα движется со скоростью V = tha =AB = 0.707 система β. (Скорость V= 0.707 выбрана для наглядности, для нее sha =1.0, а cha = 1.414).
В системе α стержень единичной длины ℓα = OH =1.0 неподвижен в пространстве, но движется во времени, при этом, в пространстве - времени системы α образуется полоска OHUQ, прочерченная началом и концом стержня (полоска А).
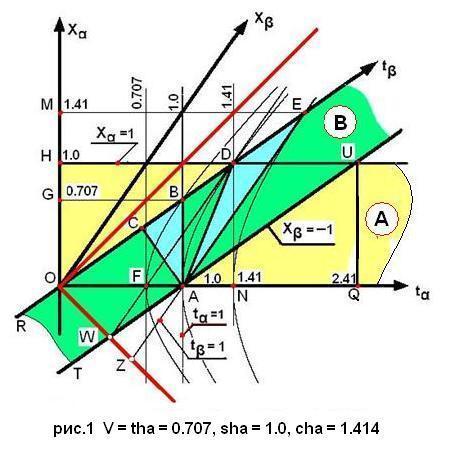
Такой же стержень, неподвижный в системе β, но движущийся в системе α вдоль Хα, в пространстве – времени системы α образует полоску REUT (полоска В). При определении длины движущегося стержня в системе α, делаются сечения полоски REUT. Очевидно, что этих сечений может быть множество, а значит и измеренных длин движущегося стержня может быть так же множество.
Сечение полоски REUT напоминает, при образном сравнении, как отмечал один ученый, сечение огурца, которое может быть перпендикулярное его длине, либо наклонное. Все сечения для удобства проводим через точку (событие) А, с координатами Хα = 0, tα =1.0.
Рассмотрим четыре характерных сечения:
1.Проведем сечение полоски REUT перпендикулярно образующим RE и TU, получим линию АС, соединяющую события А и С. Расстояние между событиями А и С (длина движущегося стержня) самое короткое из всех сечений полоски REUT.
2. Сечение АВ соединяет события А и В, одновременные в системе α. Расстояние между событиями А и В равно ℓАВ = 1/cha = tha = 0.707 и определяется из преобразований Лоренца (ПЛ).
3. Сечение AD соединяет события А и D, которые получаются при пересечении образующих полоски линий HU c RE (событие D) и OQ c TU (событие А). Расстояние между событиями А и D равно единице как в системе α, так и в системе β. В этом сечении длина движущегося стержня не изменяется при движении (равна неподвижному).
4.Сечение АЕ соединяет события А и Е, которые одновременны в системе β. В этом случае расстояние между этими событиями в системе α (длина движущегося стержня) равно К = cha. В этом сечении длина движущегося стержня растет при движении пропорционально релятивистскому коэффициенту К = cha.
Заметим, что с набором скорости ширина полоски REUT стремится к нулю (ℓСА→0), расстояние между событиями А и С стремится к нулю, а расстояние между событиями А и Е стремится к бесконечности (ℓАЕ → ∞).
Таким образом, длина движущегося стержня ℓβ при фиксированной скорости и наложенных условий при измерении (какое выбрано сечение) может оказаться уменьшенной в К = cha – раз (ℓβ = 1/K), может оказаться неизменной и равной единице ℓβ = 1.0 (в этом случае длина при движении не изменяется и равна длине неподвижного стержня), но может оказаться при измерении и удлиненной в К = cha – раз.
В общем случае, с набором скорости V = tha → 1.0, ширина полоски REUT (расстояние между событиями А и С, А и В ) стремится к нулю, расстояние между событиями А и D остается в системах α и β неизменным и равным единице, а расстояние между событиями А и Е стремится к ∞.
Следовательно, измеренная длина движущегося стержня, в зависимости от скорости и наложенного условия при измерении длины (выбранного сечения полоски REUT) может изменяться в пределах от 0 до ∞.
Симметричные рассуждения можно провести и с единицей времени при движении.